Hierarchical Bayesian Models with Dynamical Systems¶
Outline¶
Overview: Composing Hierarchical Bayesian Models with ODEs
Background: causal reasoning in dynamical systems
Modeling assumptions
Setup¶
Here, we install the necessary Pytorch, Pyro, and ChiRho dependencies for this example.
[1]:
%reload_ext autoreload
%autoreload 2
import warnings
warnings.filterwarnings("ignore")
import os
import matplotlib.pyplot as plt
import pyro
import pyro.distributions as dist
import seaborn as sns
import torch
from pyro.infer import Predictive
from pyro.infer.autoguide import AutoLowRankMultivariateNormal, AutoMultivariateNormal
from typing import Optional
from chirho.dynamical.handlers import (
LogTrajectory,
StaticBatchObservation,
StaticIntervention,
)
from chirho.dynamical.handlers.solver import TorchDiffEq
from chirho.dynamical.ops import Dynamics, State, simulate
from chirho.observational.handlers import condition
from chirho.interventional.handlers import do
from chirho.counterfactual.handlers import MultiWorldCounterfactual
from chirho.indexed.ops import IndexSet, gather, indices_of
pyro.settings.set(module_local_params=True)
sns.set_style("white")
# Set seed for reproducibility
seed = 123
pyro.clear_param_store()
pyro.set_rng_seed(seed)
smoke_test = "CI" in os.environ
num_steps = 10 if smoke_test else 200
num_samples = 10 if smoke_test else 500
[2]:
# plotting functions
line_styles = ["solid", "dashed", "dotted", "dashdot"]
colors = {"S": "blue", "I": "red", "R": "green"}
def SIR_uncertainty_plot(time_period, state_pred, color, ax, linestyle="solid", line_label=None, interval_label=None):
sns.lineplot(
x=time_period,
y=state_pred.mean(dim=0) if state_pred.ndim > 1 else state_pred,
color=color,
linestyle=linestyle,
ax=ax,
label=line_label,
)
if state_pred.ndim > 1:
# 95% Credible Interval
ax.fill_between(
time_period,
torch.quantile(state_pred, 0.025, dim=0),
torch.quantile(state_pred, 0.975, dim=0),
alpha=0.2,
color=color,
label=interval_label,
)
def SIR_peak_plot(true_state, true_logging_times, ax, label=None):
peak_idx = torch.argmax(true_state)
ax.axvline(true_logging_times[peak_idx], color="red", label=label)
def SIR_data_plot(time_period, data, data_label, ax, color="black"):
sns.scatterplot(x=time_period, y=data, color=color, ax=ax, label=data_label)
def SIR_test_plot(test_start_time, test_end_time, ax):
ax.axvline(
test_start_time, color="black", linestyle=":", label="Measurement Period"
)
ax.axvline(test_end_time, color="black", linestyle=":")
def plot_sir_data(
n_strata,
colors,
sir_traj=None,
logging_times=None,
sir_data=None,
obs_logging_times=None,
true_traj=None,
true_logging_times=None,
plot_true_peak=False,
main_title=None,
):
fig, ax = plt.subplots(n_strata, 3, figsize=(15, 5), sharex=True, sharey=True)
if main_title is not None:
fig.suptitle(main_title, fontsize=16)
if sir_data is not None:
SIR_data_plot(
obs_logging_times,
sir_data["I_obs"],
color=colors["I"],
ax=ax[0, 1],
data_label="Observations",
)
if true_traj is not None:
for i in range(n_strata):
for j, key in enumerate(["S", "I", "R"]):
SIR_uncertainty_plot(
true_logging_times,
true_traj[key][i, :],
color="black",
ax=ax[i, j],
linestyle="dashed",
line_label="True Trajectory" if i == 2 and j == 1 else None,
)
if plot_true_peak:
SIR_peak_plot(true_traj["I"][i, :], true_logging_times, ax[i, 1], label="Peak Infection Time" if i == 1 else None)
if sir_traj is not None:
for i in range(n_strata):
for j, key in enumerate(["S", "I", "R"]):
SIR_uncertainty_plot(
logging_times,
sir_traj[key][..., 0, i, :],
color=colors[key],
ax=ax[i, j],
interval_label="95% Credible Interval" if i == 1 and j == 1 else None,
)
# Set x-axis labels
ax[i, 0].set_xlabel("Time (months)")
ax[i, 1].set_xlabel("Time (months)")
ax[i, 2].set_xlabel("Time (months)")
for i in range(n_strata):
if i == 0:
ax[i, 0].set_title("Susceptible")
ax[i, 1].set_title("Infected")
ax[i, 2].set_title("Recovered")
ax_right_2 = ax[i, 2].twinx()
ax_right_2.set_ylabel(f"Town {i+1}", rotation=270, labelpad=15)
ax_right_2.yaxis.set_label_position("right")
ax_right_2.tick_params(right=False)
ax_right_2.set_yticklabels([])
ax[0, 0].set_ylabel("")
ax[2, 0].set_ylabel("")
ax[1, 0].set_ylabel("Number of individuals (thousands)")
ax[0, 1].legend(loc="upper right")
ax[1, 1].legend(loc="upper right")
ax[2, 1].legend(loc="upper right")
plt.tight_layout()
plt.show()
Overview: Composing Hierarchical Bayesian Models with ODEs¶
In our previous tutorial on causal reasoning with continuous time dynamical systems we showed how tools like ChiRho can be extended to support declarative models that we don’t typically think of as probabilistic programs, such as differential equations models. In particular, we showed how to
learn approximation posterior distributions over dynamical systems parameters using Pyro’s support for variational inference and,
predict the effect of (uncertain) policy decisions by extending ChiRho’s intervention semantics to differential equations.
In this tutorial we expand on that simple example, demonstrating how richly structured probabilistic models compose seemlessly with dynamical systems models and solver technology. Specifically, we expand on that same epidemiological SIR model to include hierarchical priors over dynamical systems parameters for each of several distinct geographic locations.
Just as we did in our introductory dynamical systems tutorial we’ll follow a simple causal probabilsitic programming workflow in the rest of this notebook:
First, we learn approximation posterior distributions over dynamical systems parameters using Pyro’s support for variational inference, this time including over global latent variables across all strata.
Second, we use the trained model to estimate the impact of a potential interventions in each strata. As we’ll see later, our use of a hierarchical priors tightens our predictive uncertainty about the effects of interventions, even in stratum where we don’t observe any data.
Intuition¶
The key insight here is that the same Bayesian modeling motifs for pooling statistical information between distinct strata in standard Bayesian multilevel regression modeling (see Chapter 5 of Gelman et al.) can be used when the regression equations are swapped out with mechanistic models in the form of differential equations. Later in this tutorial we’ll see how this simple modeling motif succinctly captures our intuition that information is shared across strata, and thus that data in one should inform our predictions in another.
Background: causal reasoning in dynamical systems¶
If you haven’t read the preliminary tutorial on causal reasoning with continuous time dynamical systems, we strongly recommend doing so first beforing continuing. In that tutorial you’ll find a short description of how we represent causal interventions in dynamical systems, as well as all of the details behind the SIR model used in this expanded tutorial.
Modeling assumptions:¶
In this example, we again explore the SIR (Susceptible, Infected, Recovered) compartmental model, a fundamental model in epidemiology. Here, the variables of interest are:
\(S(t)\): the number of susceptible individuals at time \(t\),
\(I(t)\): the number of infected individuals at time \(t\), and
\(R(t)\): the number of recovered individuals at time \(t\).
These compartments interact through a set of ordinary differential equations that describe the rate at which individuals move from being susceptible to infected, and from infected to recovered (see our earlier tutorial for details on the differential equations.).
Unlike in the previous tutorial, where \(S\), \(I\), and \(R\) are real-valued functions of time, in this tutorial these variables will be vector-valued functions of time, where each element corresponds to the number of people susceptible, infected, and recovered in a particular stratum. In this example, each stratum refers to an individual town. We will assume the interactions between compartments within each of the towns are guided by the same equations with potentially somewhat different parameters, coming from (respectively) the same common distributions.
Causal probabilistic program¶
Just as in the previous tutorial, we define the differential equation model as a pyro.nn.PyroModule as follows, where the forward method is a function from states X to the time derivatives of the states, dX. Fortunately, we can use the exact same implementation for the stratified example here, taking advantage of PyTorch’s tensor broadcasting semantics.
[3]:
class SIRDynamics(pyro.nn.PyroModule):
def __init__(self, beta, gamma):
super().__init__()
self.beta = beta
self.gamma = gamma
def forward(self, X: State[torch.Tensor]):
dX = dict()
dX["S"] = -self.beta * X["S"] * X["I"]
dX["I"] = self.beta * X["S"] * X["I"] - self.gamma * X["I"]
dX["R"] = self.gamma * X["I"]
return dX
Also, we assume we only make observations in one of the locations. Conceptually, single_observation_model() takes a trajectory already produced by a simulation, and generates a sample of Poisson-distributed observations for the first stratum.
[4]:
def sir_observation_model(X: State[torch.Tensor]) -> None:
# Note: Here we set the event_dim to 1 if the last dimension of X["I"] is > 1, as the sir_observation_model
# can be used for both single and multi-dimensional observations.
event_dim = 1 if X["I"].shape and X["I"].shape[-1] > 1 else 0
pyro.sample(
"I_obs", dist.Poisson(X["I"]).to_event(event_dim)
) # noisy number of infected actually observed
pyro.sample(
"R_obs", dist.Poisson(X["R"]).to_event(event_dim)
) # noisy number of recovered actually observed
def single_observation_model(X: State[torch.Tensor]) -> None:
# In this example we only take noisy measurements of a single town corresponding to
# the first index in the state tensors (0 in the second-last dimension, the last dimension is time).
first_X = {k: v[..., 0, :] for k, v in X.items()}
return sir_observation_model(first_X)
To use this model definition in a stratified setting, we simply extend the tensor dimensions of the init_state as follows.
[5]:
n_strata = 3
# Assume that in each town there is initially a population of 99 thousand people that are susceptible,
# 1 thousand infected, and 0 recovered.
init_state = dict(
S=torch.ones(n_strata) * 99, I=torch.ones(n_strata), R=torch.zeros(n_strata)
)
Next we generate synthetic ground truth trajectories from known parameters using our SIR model.
[6]:
start_time = torch.tensor(0.0)
end_time = torch.tensor(6.0)
step_size = torch.tensor(0.1)
logging_times = torch.arange(start_time, end_time, step_size)
# We now simulate from the SIR model. Notice that the true parameters are similar to each other,
# but not exactly the same.
beta_true = torch.tensor([0.03, 0.04, 0.035])
gamma_true = torch.tensor([0.4, 0.385, 0.405])
sir_true = SIRDynamics(beta_true, gamma_true)
with TorchDiffEq(), LogTrajectory(logging_times) as lt:
simulate(sir_true, init_state, start_time, end_time)
sir_true_traj = lt.trajectory
Finally, we generate synthetic observations for a single stratum using our single_observation_model() with the same ground truth parameters.
[7]:
obs_start_time = torch.tensor(0.5) # Measurements start 0.5 months into the pandemic
obs_sample_rate = torch.tensor(1 / 7) # Take measurements once per week
obs_end_time = torch.tensor(6.0) # Measurements end after 6th month
obs_logging_times = torch.arange(obs_start_time, obs_end_time, obs_sample_rate)
N_obs = obs_logging_times.shape[0]
with TorchDiffEq(), LogTrajectory(obs_logging_times) as lt_obs:
simulate(sir_true, init_state, start_time, obs_end_time)
sir_obs_traj = lt_obs.trajectory
with pyro.poutine.trace() as tr:
# Suppose we only observe the number of infected and recovered individuals in the first town.
single_observation_model(sir_obs_traj)
sir_data = dict(**{k: tr.trace.nodes[k]["value"] for k in ["I_obs", "R_obs"]})
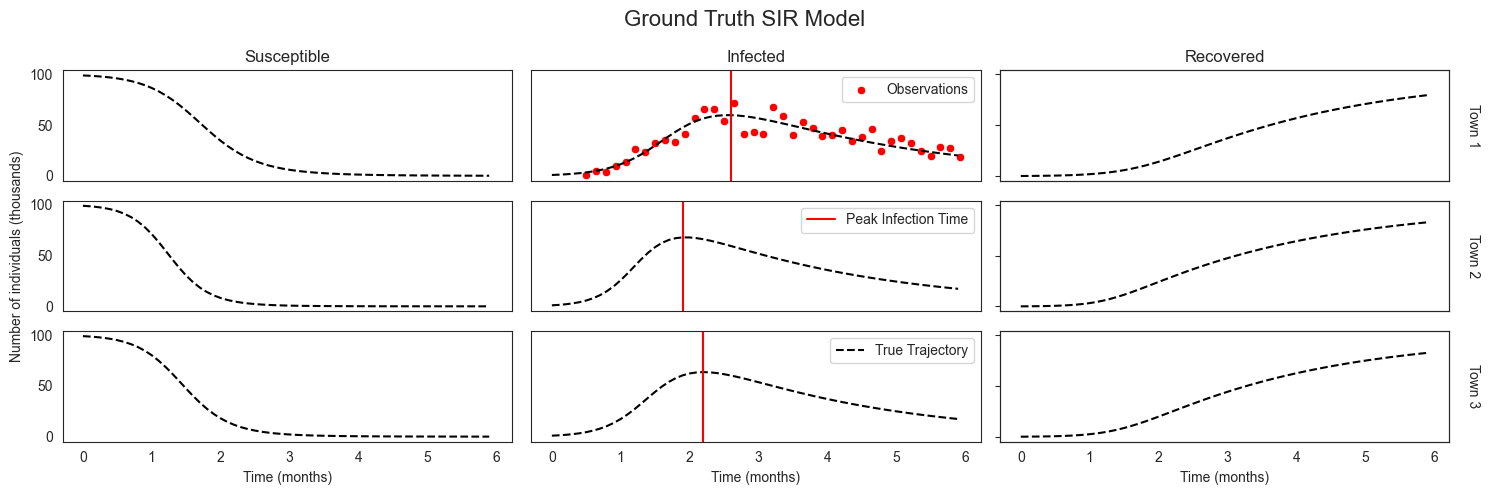
Putting this all together we have ground truth parameters and state trajectories for each of three location, and noisy observations of the number of infected individuals for only the first.
[8]:
plot_sir_data(
n_strata,
colors=colors,
true_traj=sir_true_traj,
true_logging_times=logging_times,
sir_data=sir_data,
obs_logging_times=obs_logging_times,
plot_true_peak=True,
main_title="Ground Truth SIR Model",
)
Multi-level Bayesian model¶
Now that we’ve defined our (stratified) SIR model, we can add hierarchically structured distributions over its parameters to construct a multi-level Bayesian SIR model.
For local parameters we’ll be using Gamma distributions, which - for convenience - we reparametrize in terms of mean and standard deviation. These will be sampled around group-level coefficients, the uncertainty about which will be expressed in terms of Beta distributions.
[9]:
def reparameterize_inverse_gamma(mean, std):
alpha = 2 + mean**2 / std**2
beta = mean * (alpha - 1)
return alpha, beta
def bayesian_multilevel_sir_prior(
n_strata: int = 3, beta_mean: Optional[torch.Tensor] = None, gamma_mean: Optional[torch.Tensor] = None
) -> tuple[torch.Tensor, torch.Tensor, pyro.plate]:
beta_mean = pyro.sample("beta_mean", dist.Beta(1, 10), obs=beta_mean)
beta_std = 0.01
gamma_mean = pyro.sample("gamma_mean", dist.Beta(10, 10), obs=gamma_mean)
gamma_std = 0.01
strata_plate = pyro.plate("strata", size=n_strata, dim=-1)
with strata_plate:
beta = pyro.sample(
"beta",
dist.InverseGamma(*reparameterize_inverse_gamma(beta_mean, beta_std)),
)
gamma = pyro.sample(
"gamma",
dist.InverseGamma(*reparameterize_inverse_gamma(gamma_mean, gamma_std)),
)
return beta, gamma, strata_plate
To understand this multi-level structure a bit more, we can render the probabilsitic program as a directed graphical model using pyro.render_model.
[10]:
# Note: this is a bit of a hack to render the model.
# For some unknown reason `simulate` does not compose with the model rendering.
def rendering_model(n_strata=3) -> State[torch.Tensor]:
beta, gamma, strata_plate = bayesian_multilevel_sir_prior(n_strata)
sir = SIRDynamics(beta, gamma)
state = dict(
S=torch.ones(n_strata) * 99, I=torch.ones(n_strata), R=torch.zeros(n_strata)
)
deriv = sir(state)
state = {k: v + deriv[k] * 0.1 for k, v in state.items()}
deriv = sir(state)
state = {k: v + deriv[k] * 0.1 for k, v in state.items()}
with strata_plate:
state = {k: pyro.sample(k, dist.Delta(v)) for k, v in state.items()}
with pyro.condition(
data={"I_obs": torch.ones(n_strata), "R_obs": torch.zeros(n_strata)}
):
sir_observation_model(state)
# Note: this only works with Pyro 1.9.0. This will need to wait until ChiRho is updated to Pyro 1.9.0.
# Or force-install that version of Pyro after installing ChiRho, risking some incompatibilities.
pyro.render_model(rendering_model, model_args=(3,), render_deterministic=True)
[10]:

To understand this hierarchically structured prior over parameter, let’s plot the prior distribution over beta and gamma. Specifically, we’ll plot the prior distribution over both global beta_mean and gamma_mean as well as the marginal distributions town-level beta and gamma. In addition, we’ll plot the conditional distribution of town-level beta and gamma parameters given particular values for the global beta_mean and gamma_mean parameters.
[11]:
parameter_prior_predictive = Predictive(
bayesian_multilevel_sir_prior, num_samples=num_samples*100, parallel=True
)
parameter_prior_samples = parameter_prior_predictive()
conditional_parameter_samples = parameter_prior_predictive(beta_mean=torch.tensor(0.05), gamma_mean=torch.tensor(0.75))
fig, ax = plt.subplots(3, 2, figsize=(17, 8), sharex=True)
sns.kdeplot(
parameter_prior_samples['beta_mean'].squeeze(),
ax=ax[0,0],
color="gray",
label="Global mean $\\beta$",
linewidth=3,
bw_adjust=.6,
clip=(0, 1),
)
sns.kdeplot(
parameter_prior_samples['gamma_mean'].squeeze(),
ax=ax[0,1],
color="gray",
label="Global mean $\\gamma$",
linewidth=3,
bw_adjust=.6,
clip=(0, 1),
)
for i in range(3):
sns.kdeplot(
parameter_prior_samples['beta'][:, i],
ax=ax[1,0],
alpha=0.4,
color="blue",
label=f"Town {i} $\\beta$ - Marginal Probability",
linewidth=1.5,
bw_adjust=.6,
clip=(0, 1),
)
sns.kdeplot(
parameter_prior_samples['gamma'][:, i],
ax=ax[1,1],
alpha=0.4,
color="blue",
label=f"Town {i} $\\gamma$ - Marginal Probability",
linewidth=1.5,
bw_adjust=.6,
clip=(0, 1),
)
sns.kdeplot(
conditional_parameter_samples['beta'][:, i],
ax=ax[2,0],
alpha=0.4,
color="green",
label=f"Town {i} $\\beta$ - Conditional Probability if global mean $\\beta$ is 0.05",
linewidth=1.5,
bw_adjust=.6,
clip=(0, 1),
)
sns.kdeplot(
conditional_parameter_samples['gamma'][:, i],
ax=ax[2,1],
alpha=0.4,
color="green",
label=f"Town {i} $\\gamma$ - Conditional Probability if global mean $\\gamma$ is 0.75",
linewidth=1.5,
bw_adjust=.6,
clip=(0, 1),
)
size = 9
ax[0,0].legend(prop={'size': size})
ax[0,1].legend(prop={'size': size})
ax[1,0].legend(prop={'size': size})
ax[2,0].legend(prop={'size': size})
ax[1,1].legend(prop={'size': size})
ax[2,1].legend(prop={'size': size})
sns.despine()
plt.suptitle("Marginal and Conditional distributions of $\\beta$ and $\\gamma$", fontsize=16)
plt.tight_layout()
plt.xlim(0, 1)
plt.show()
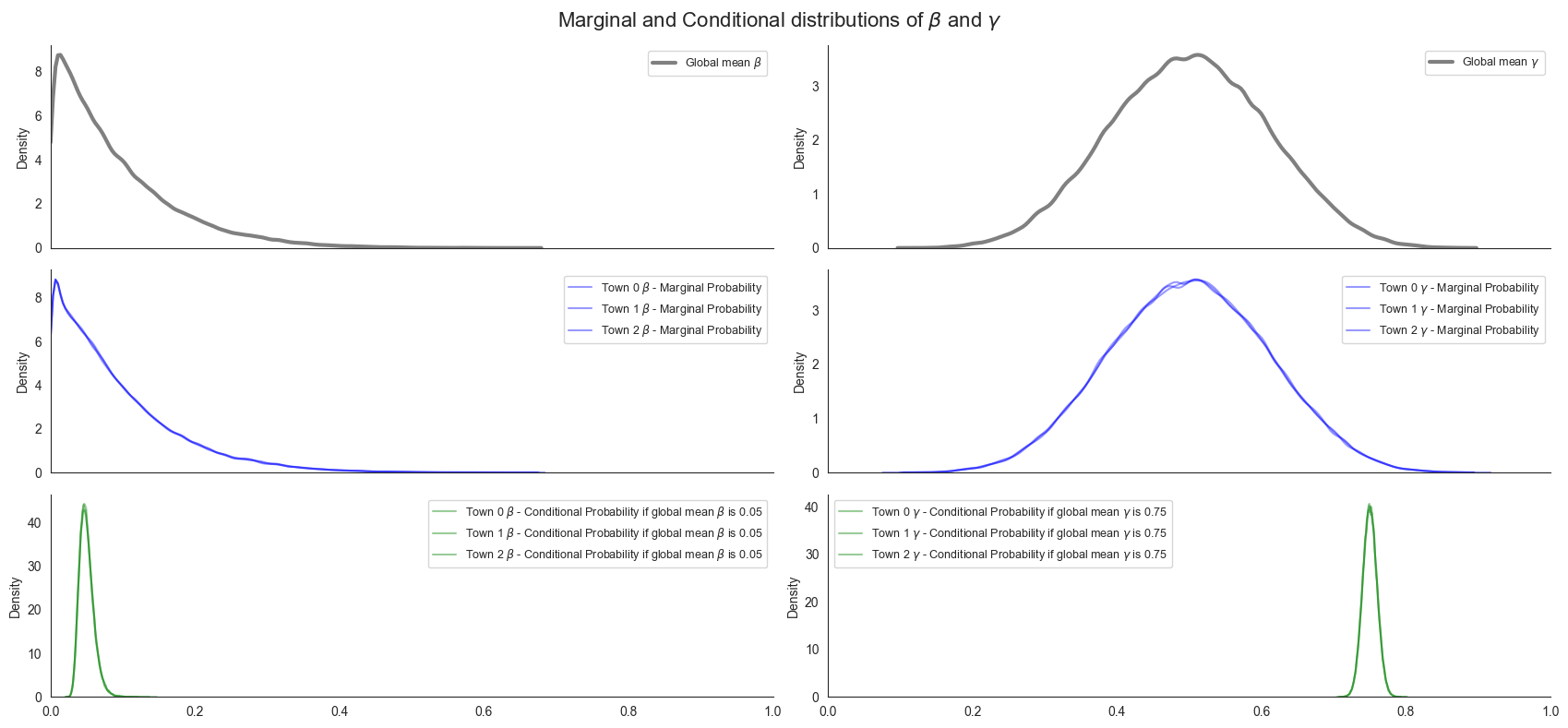
The key takeaway from these plots is that while the marginal distribution over town-level beta and gamma parameters has broad uncertainty, the conditional distribution given a known beta_mean and gamma_mean is actually quite narrow. In other words, the majority of our uncertainty comes from our uncertainty in beta_mean and gamma_mean itself. As we’ll see later, this property will help us transfer our inferences about one town’s parameter values to other towns, and thus
improve our predicted trajectories. so Now we put some components together. First we sample the parameters, then we pass them use our TorchDiffEq solver to simulate from the vectorized SIR dynamical system.
[12]:
def simulated_multilevel_bayesian_sir(
init_state, start_time, logging_times, base_model=SIRDynamics, is_traced=True
) -> State[torch.Tensor]:
n_strata = init_state["S"].shape[-1]
assert init_state["I"].shape[-1] == init_state["R"].shape[-1] == n_strata
beta, gamma, _ = bayesian_multilevel_sir_prior(n_strata)
sir = base_model(beta, gamma)
with TorchDiffEq(), LogTrajectory(logging_times, is_traced=is_traced) as lt:
simulate(sir, init_state, start_time, logging_times[-1])
return lt.trajectory
We can also inspect prior predictions, by generating the samples. Note how the shape of the sample, with some padding, captures the number of samples, the numer of locations, and the number of logging times, respectively. We just add the prior credible intervals to the illustration we’ve already seen.
[13]:
prior_predictive = Predictive(
simulated_multilevel_bayesian_sir, num_samples=num_samples, parallel=True
)
prior_samples = prior_predictive(init_state, start_time, logging_times)
plot_sir_data(
n_strata=n_strata,
colors=colors,
true_traj=sir_true_traj,
true_logging_times=logging_times,
sir_traj=prior_samples,
logging_times=logging_times,
sir_data=sir_data,
obs_logging_times=obs_logging_times,
main_title="Multilevel Bayesian SIR Model Prior Predictive (means with 95% credible intervals)",
)
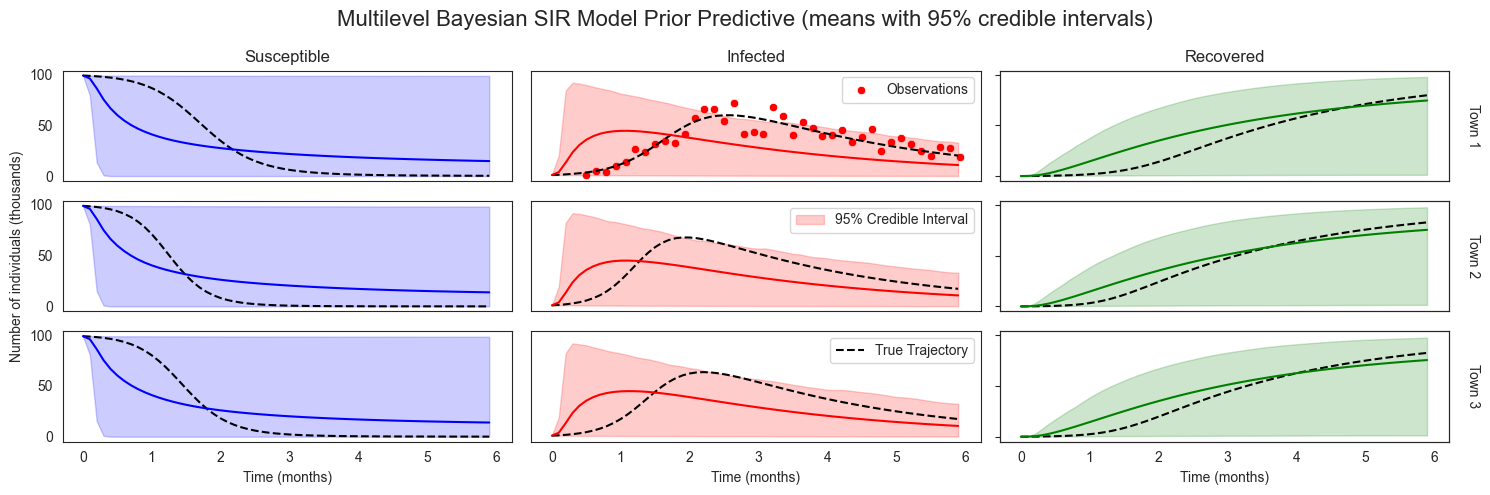
We can see that without any data our prior has induced extremely broad uncertainty over resulting disease dynamics.
Using the model¶
Probabilistic Inference over Dynamical System Parameters¶
One of the major benefits of writing our dynamical systems model in Pyro and ChiRho is that we can leverage Pyro’s support for (partially) automated probabilistic inference. In this section we’ll (i) condition on observational data using the StaticBatchObservation effect handler and (ii) optimize a variational approximation to the posterior using Pyro’s SVI utilities.
[14]:
def conditioned_sir(
obs_times, data, init_state, start_time, base_model=SIRDynamics
) -> None:
n_strata = init_state["S"].shape[-1]
assert init_state["I"].shape[-1] == init_state["R"].shape[-1] == n_strata
beta, gamma, _ = bayesian_multilevel_sir_prior(n_strata)
sir = base_model(beta, gamma)
obs = condition(data=data)(single_observation_model)
with TorchDiffEq(), StaticBatchObservation(obs_times, observation=obs):
simulate(sir, init_state, start_time, obs_times[-1])
# Define a helper function to run SVI.
# (Generally, Pyro users like to have more control over the training process!)
def run_svi_inference(
model,
num_steps=num_steps,
verbose=True,
lr=0.03,
vi_family=AutoMultivariateNormal,
guide=None,
**model_kwargs
):
if guide is None:
guide = vi_family(model)
elbo = pyro.infer.Trace_ELBO()(model, guide)
# initialize parameters
elbo(**model_kwargs)
adam = torch.optim.Adam(elbo.parameters(), lr=lr)
# Do gradient steps
for step in range(1, num_steps + 1):
adam.zero_grad()
loss = elbo(**model_kwargs)
loss.backward()
adam.step()
if (step % 25 == 0) or (step == 1) & verbose:
print("[iteration %04d] loss: %.4f" % (step, loss))
return guide
[15]:
# Run inference to approximate the posterior distribution of the SIR model parameters
sir_guide = run_svi_inference(
conditioned_sir,
num_steps=num_steps,
obs_times=obs_logging_times,
data=sir_data,
init_state=init_state,
start_time=start_time,
)
[iteration 0001] loss: 1424.7148
[iteration 0025] loss: 301.4027
[iteration 0050] loss: 271.2673
[iteration 0075] loss: 278.4545
[iteration 0100] loss: 245.6980
[iteration 0125] loss: 248.8618
[iteration 0150] loss: 251.9503
[iteration 0175] loss: 253.8547
[iteration 0200] loss: 249.9853
Inspecting the posterior marginals¶
Now we can plot the approximate posterior distributions over town-level parameters gamma and beta.
[16]:
# Generate samples from the posterior predictive distribution
sir_predictive = Predictive(
simulated_multilevel_bayesian_sir,
guide=sir_guide,
num_samples=num_samples,
parallel=True,
)
sir_posterior_samples = sir_predictive(init_state, start_time, logging_times)
[17]:
fig, ax = plt.subplots(n_strata, 2, figsize=(15, 8))
for i in range(n_strata):
sns.kdeplot(prior_samples["beta"][..., i], label="Prior", ax=ax[i, 0], clip=(0, 1))
sns.kdeplot(sir_posterior_samples["beta"][..., i], label="Approximate Posterior", ax=ax[i, 0], clip=(0, 1))
ax[i, 0].axvline(beta_true[i], color="black", label="Ground Truth", linestyle="--")
# ax[i, 0].set_yticks([])
ax[i, 0].set_xlabel("Beta")
ax[i, 0].set_xlim(0, 0.2)
ax[i, 0].set_ylim(0, 30)
ax[i, 0].set_ylabel("Density")
sns.kdeplot(prior_samples["gamma"][..., i], ax=ax[i, 1], clip=(0, 1))
sns.kdeplot(sir_posterior_samples["gamma"][..., i], ax=ax[i, 1], clip=(0, 1))
ax[i, 1].axvline(gamma_true[i], color="black", linestyle="--")
ax[i, 1].set_ylabel("Density")
# ax[i, 1].set_yticks([])
ax[i, 1].set_xlabel("Gamma")
ax[i, 1].set_xlim(0.2, 0.8)
ax[i, 1].set_ylim(0, 30)
ax_right_1 = ax[i, 1].twinx()
ax_right_1.set_ylabel(f"Town {i+1}", rotation=270, labelpad=15)
ax_right_1.yaxis.set_label_position("right")
ax_right_1.tick_params(right=False)
ax_right_1.set_yticklabels([])
ax[0, 0].legend(loc="upper right")
fig.suptitle("Posterior marginal densities of dynamical systems parameters", fontsize=16)
plt.tight_layout()
sns.despine()
plt.show()
# The y limit is cut for readability as absolute values of densities tend to be large.
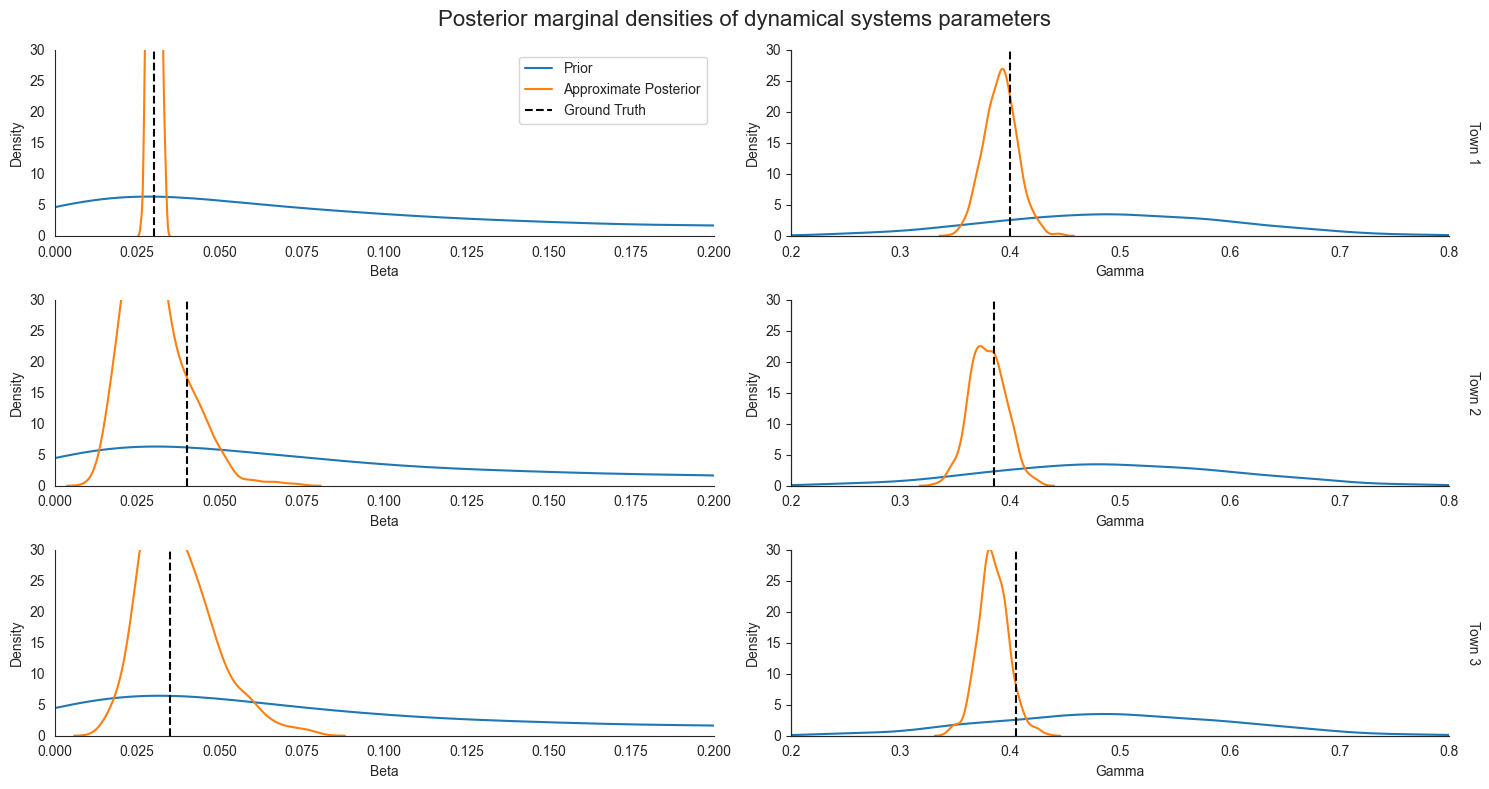
When we inspect the posterior marginals, we see that our certainty decreased the most for Town 1. However, we also see that our estimates changed for other distributions as well. Intuitively, it is helpful to think of information flowing through our probabilsitic model. Observations from Town 1’s trajectory provide information about Town 1’s parameters beta and gamma, which provide information about likely values of the global beta_mean and gamma_mean that generated the
town-level parameters. As we showed above when sampling from the prior, given knowledge about the value of beta_mean and gamma_mean, our uncertainty about gamma and beta for Town 1 and Town 2 narrows substantially. This phenomenon is exactly what we see in the full joint posterior over parameters above.
Inspecting the posterior predictive distribution¶
Now that we’ve approximated the posterior distribution over parameters, let’s see how the posterior samples compare to the ground truth disease trajectories.
[18]:
plot_sir_data(
n_strata=n_strata,
colors=colors,
true_traj=sir_true_traj,
true_logging_times=logging_times,
sir_traj=sir_posterior_samples,
logging_times=logging_times,
sir_data=sir_data,
obs_logging_times=obs_logging_times,
main_title="Multilevel Bayesian SIR Model Posterior Predictive (means with 95% credible intervals)",
)
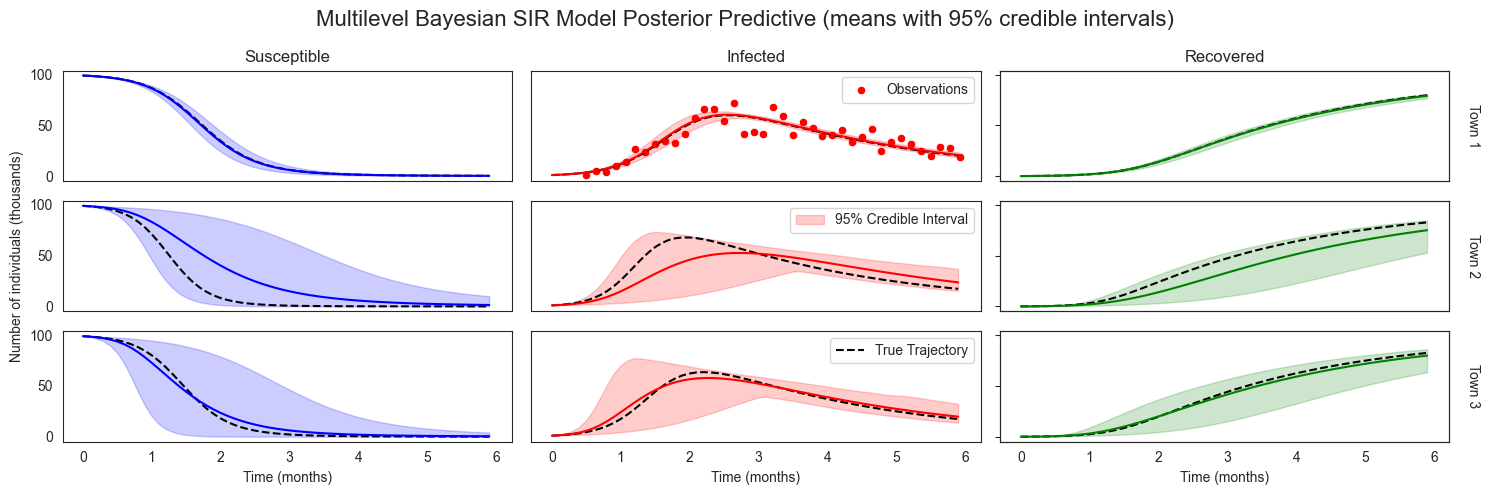
Notice how our posterior predictive distributions is substantially more narrow for Town 1 (where we have direct observations) than for Town 2 and Town 3. That said, our posterior predictions for Town 2 and 3 are still more narrow than they were under the prior, reflecting information about global disease dynamic parameters we’ve discovered from our data in Town 1.
Modeling Interventions¶
Now, as in the previous tutorial on dynamical systems, suppose the government can enact different lockdown measures (of varying strength) to flatten the infection curve. Following [2]. The strength of lockdown measure at time \(t\) by \(l(t) \in [0, 1]\) for \(1 \leq t \leq T\). Parametrize the transmission rate \(\beta_t\) as:
where \(\beta_0\) denotes the unmitigated transmission rate and larger values of \(l(t)\) correspond to stronger lockdown measures. Then, the time-varying SIR model is defined as follows:
where \(S, I, R\) denote the number of susceptible, infected, and recovered individuals at time \(t\) for \(1 \leq t \leq T\). In our running example, we will assume that initially no intervention is being implemented, and consider intervening at time 1.0 with a lockdown policy of strength 0.7. We can implement this new model as follows:
[19]:
class SIRDynamicsLockdown(SIRDynamics):
def __init__(self, beta0, gamma):
super().__init__(beta0, gamma)
self.beta0 = beta0
def forward(self, X: State[torch.Tensor]):
self.beta = (
1 - X["l"]
) * self.beta0 # time-varing beta parametrized by lockdown strength l_t
dX = super().forward(X)
dX["l"] = torch.zeros_like(
X["l"]
) # no dynamics for the lockdown strength unless intervened
return dX
init_state_lockdown = dict(**init_state, l=torch.tensor(0.0))
[20]:
def intervened_sir(
lockdown_start, lockdown_strength, init_state, start_time, logging_times
) -> State[torch.Tensor]:
n_strata = init_state["S"].shape[-1]
assert init_state["I"].shape[-1] == init_state["R"].shape[-1] == n_strata
beta, gamma, _ = bayesian_multilevel_sir_prior(n_strata)
sir = SIRDynamicsLockdown(beta, gamma)
with LogTrajectory(logging_times, is_traced=True) as lt:
with TorchDiffEq():
with StaticIntervention(
time=lockdown_start, intervention=dict(l=lockdown_strength)
):
simulate(sir, init_state, start_time, logging_times[-1])
return lt.trajectory
Using intervened_sir, we can now sample from the prior and posterior predictive distributions with a lockdown intervention.
[21]:
lockdown_start = torch.tensor(1.0)
lockdown_strength = torch.tensor([0.7])
true_intervened_sir = pyro.condition(
intervened_sir, data={"beta": beta_true, "gamma": gamma_true}
)
true_intervened_trajectory = true_intervened_sir(
lockdown_start, lockdown_strength, init_state_lockdown, start_time, logging_times
)
intervened_sir_posterior_predictive = Predictive(
intervened_sir, guide=sir_guide, num_samples=num_samples, parallel=True
)
intervened_sir_posterior_samples = intervened_sir_posterior_predictive(
lockdown_start, lockdown_strength, init_state_lockdown, start_time, logging_times
)
intervened_sir_prior_predictive = Predictive(
intervened_sir, num_samples=num_samples, parallel=True
)
intervened_sir_prior_samples = intervened_sir_prior_predictive(
lockdown_start, lockdown_strength, init_state_lockdown, start_time, logging_times
)
First, we visualize the true intervened trajectory and what the priors would predict the effects of an intervention would be. Expectedly, while the prior predictives cover the true trajectory, they are extremely uncertain.
[22]:
plot_sir_data(
n_strata,
colors=colors,
true_traj=true_intervened_trajectory,
true_logging_times=logging_times,
sir_traj=intervened_sir_prior_samples,
logging_times=logging_times,
main_title="Intervened Multilevel Bayesian SIR Model Prior Predictive",
)
No artists with labels found to put in legend. Note that artists whose label start with an underscore are ignored when legend() is called with no argument.
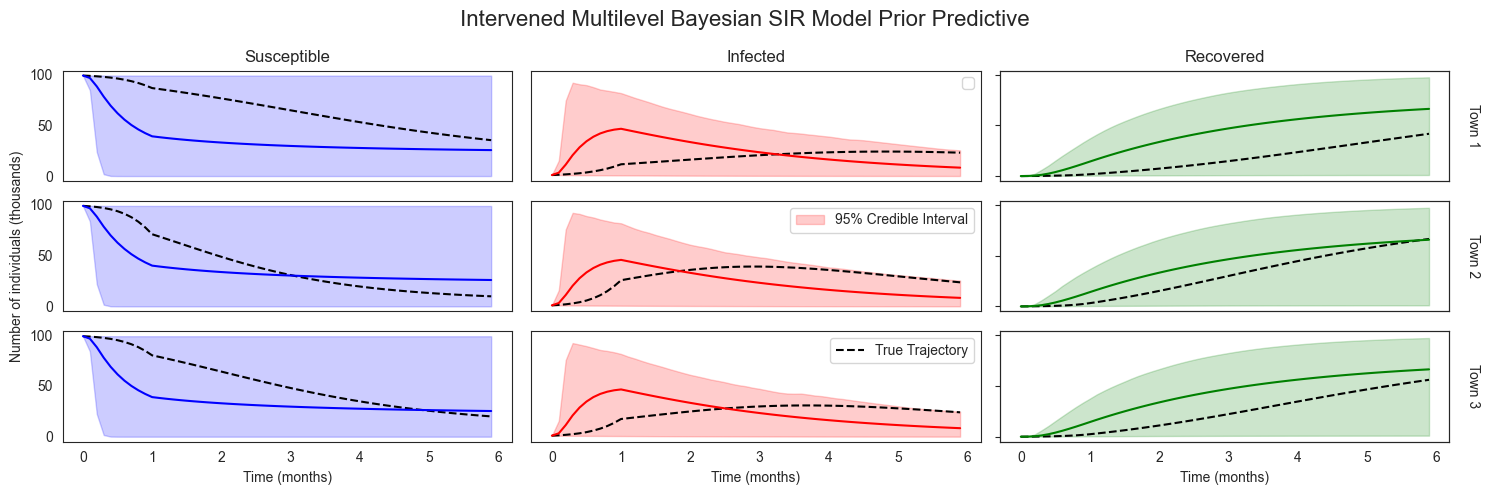
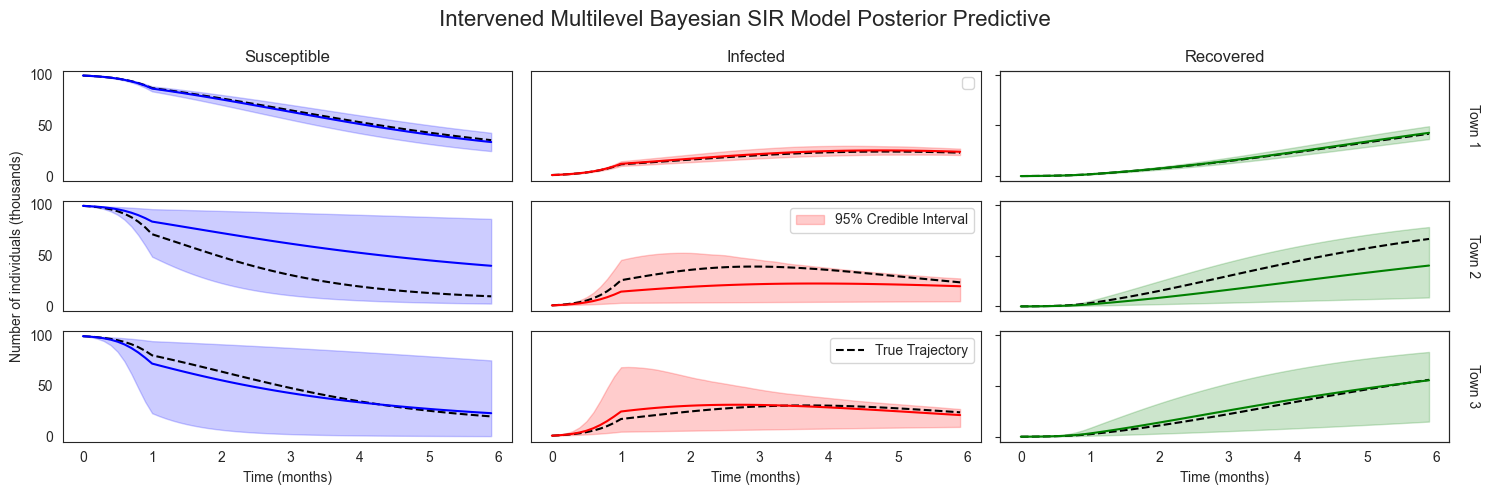
Comparing these prior predictive trajectories to our posterior predictive trajectories, we clearly see that our observations have led to more certain predictions about how disease will spread under a lockdown condition. As we saw for the case without an intervention, our predictions are much more certain for the town we have observations from than for the other towns. Still, the predictions for Towns 2 and 3 are still informed by our observations in Town 1.
[23]:
plot_sir_data(
n_strata,
colors=colors,
true_traj=true_intervened_trajectory,
true_logging_times=logging_times,
sir_traj=intervened_sir_posterior_samples,
logging_times=logging_times,
main_title="Intervened Multilevel Bayesian SIR Model Posterior Predictive",
)
No artists with labels found to put in legend. Note that artists whose label start with an underscore are ignored when legend() is called with no argument.
Looking Forward¶
This tutorial is just one of many different ways ChiRho makes it easy to combine statistical techniques with mechanistic models. As non-exhaustive examples, one could instead assume that the mutual information between stratum-level parameters depends on geographic proximity, and/or extend the probabilistic program to regress stratum-level parameters on observed covariates. Our hope is that this and other examples inspire users to be creative, and to explore the rich spectrum between statistical and mechanistic modeling for scientific and policy applications.
References¶
Gelman, A., Carlin, J. B., Stern, H. S., & Rubin, D. B. (1995). Bayesian data analysis.